U-Boot
- Introduction
- Use U-Boot
- Load Linux with U-Boot on AT91 boards
- U-Boot for AT91 source code
- Branches
- Tags
- linux4microchip_2024.04 tag
- linux4microchip_2023.10 tag
- linux4sam_2023.04 tag
- linux4sam_2022.10 tag
- linux4sam_2022.04 tag
- linux4sam_2021.10 tag
- linux4sam_2021.04 tag
- linux4sam_2020.10 tag
- linux4sam_2020.04 tag
- linux4sam_6.2-icp tag
- linux4sam_6.2 tag
- linux4sam_6.1 tag
- linux4sam_6.0 tag
- linux4sam_5.0-alpha7 tag
- linux4sam_4.7 tag
- linux4sam_4.6 tag
- linux4sam_4.5 tag
- Build U-Boot from sources
- Program U-Boot binary into nandflash
- Recent FAQ
Introduction
Das U-Boot - the Universal Boot Loader wiki websitedoc/ Use U-Boot
U-Boot Main Commands
setenv this command is used to set variablessaveenv this command saves variables previously set in the environment permanent storage space
printenv this command print the current variables The
help command show a brief summary of the built-in commands of U-Boot. Here is a selection of useful commands :
U-Boot> help ? - alias for 'help' base - print or set address offset bdinfo - print Board Info structure boot - boot default, i.e., run 'bootcmd' bootd - boot default, i.e., run 'bootcmd' bootm - boot application image from memory bootp - boot image via network using BOOTP/TFTP protocol bootz - boot Linux zImage image from memory cls - clear screen cmp - memory compare coninfo - print console devices and information cp - memory copy crc32 - checksum calculation dhcp - boot image via network using DHCP/TFTP protocol echo - echo args to console editenv - edit environment variable env - environment handling commands erase - erase FLASH memory exit - exit script false - do nothing, unsuccessfully fatinfo - print information about filesystem fatload - load binary file from a dos filesystem fatls - list files in a directory (default /) fatsize - determine a file's size fatwrite- write file into a dos filesystem fdt - flattened device tree utility commands flinfo - print FLASH memory information go - start application at address 'addr' help - print command description/usage iminfo - print header information for application image imls - list all images found in flash imxtract- extract a part of a multi-image itest - return true/false on integer compare loadb - load binary file over serial line (kermit mode) loadx - load binary file over serial line (xmodem mode) loady - load binary file over serial line (ymodem mode) loop - infinite loop on address range md - memory display mdio - MDIO utility commands mii - MII utility commands mm - memory modify (auto-incrementing address) mmc - MMC sub system mmcinfo - display MMC info mw - memory write (fill) nand - NAND sub-system nboot - boot from NAND device nfs - boot image via network using NFS protocol nm - memory modify (constant address) ping - send ICMP ECHO_REQUEST to network host printenv- print environment variables protect - enable or disable FLASH write protection reset - Perform RESET of the CPU run - run commands in an environment variable saveenv - save environment variables to persistent storage setenv - set environment variables sf - SPI flash sub-system showvar - print local hushshell variables sleep - delay execution for some time source - run script from memory test - minimal test like /bin/sh tftpboot- boot image via network using TFTP protocol true - do nothing, successfully usb - USB sub-system usbboot - boot from USB device version - print monitor, compiler and linker version U-Boot>Refer to the U-Boot manual page for the command line interface
U-Boot script capability
You can create script or complex variables, which prevents you to type commands. Here is a summary of several variables built to make a network loading of linux easier :
setenv boot_addr 0x21400000
setenv linux 'tftp ${boot_addr} linux-2.6.x.img'
setenv ramdisk_addr 0x21100000
setenv ramdisk 'tftp ${ramdisk_addr} sam9-ramdisk.gz'
setenv go 'run linux; run ramdisk; bootm ${boot_addr}'
saveenv
The setenv linux 'tftp ${boot_addr} linux-2.6.x.img' line is equivalent of typing tftp 0x21400000 linux-2.6.x.img but combined with others and stored in flash, it allows you to save time, and automate. For executing a Linux kernel bootup, using this snippet, simply type run go
Boot pre-defined variables and command:
bootcmd- Here is a example of
bootcmdin default at91 board:bootcmd=nand read 0x21000000 0x00180000 0x00080000; nand read 0x22000000 0x00200000 0x00600000;bootz 0x22000000 - 0x21000000
- Here are examples of
bootargs:bootargs_nand=console=ttyS0,115200 mtdparts=atmel_nand:256k(bootstrap)ro,512k(uboot)ro,256K(env),256k(env_redundent),256k(spare),512k(dtb),6M(kernel)ro,-(rootfs) rootfstype=ubifs ubi.mtd=7 root=ubi0:rootfs bootargs_nfs=console=ttyS0,115200 mtdparts=atmel_nand:8M(kernel)ro,220M(rootfs),20M(test),-(protect) rw root=/dev/nfs rw nfsroot=10.217.12.45:/nfsroot/rootfs/yocto ip=dhcp
PDA detection at boot
Since U-boot 2018.07, released with linux4sam_6.0, we have the feature of auto detection of the connected PDA screenOne wire EEPROM
The PDAs have a 512-byte Maxim DS24 1wire EEPROM which is available on the pin 1 of the LCD connector. This memory holds the specific information for the PDA type.
|
|||||||||||||||||
U-boot behavior
At boot time, U-boot will:- Initialize 1wire bus and protocol on the GPIO connected on pin 1 of the LCD connector
- Read the EEPROM memory of the PDA
- Copy the contents of the PDA memory at the offset where the screen type is stored into an environment variable called 'pda'
- Print an information message in the booting log with the detected PDA
Example
U-Boot 2018.07-linux4sam_6.0 (Oct 03 2018 - 16:03:04 +0000) CPU: SAMA5D27-CU Crystal frequency: 12 MHz CPU clock : 498 MHz Master clock : 166 MHz DRAM: 512 MiB MMC: sdio-host@a0000000: 0, sdio-host@b0000000: 1 Loading Environment from SPI Flash... SF: Detected at25df321a with page size 256 Bytes, erase size 4 KiB, total 4 MiB OK In: serial@f8020000 Out: serial@f8020000 Err: serial@f8020000 PDA TM5000 detected Net: eth0: ethernet@f8008000 Hit any key to stop autoboot: 0In this example we can see that PDA TM5000 was detected. Further more, if we inspect the U-boot environment:
=> print baudrate=115200 bootargs=console=ttyS0,115200 root=/dev/mmcblk0p1 rw rootfstype=ext4 rootwait atmel.pm_modes=standby,ulp1 bootcmd=ext4load mmc 0 0x24000000 boot/sama5d2_xplained.itb; bootm 0x24000000#kernel_dtb bootdelay=1 ethaddr=fc:c2:3d:0d:1f:4b fdtcontroladdr=3fb773c8 pda=5000 stderr=serial@f8020000 stdin=serial@f8020000 stdout=serial@f8020000We can see that the variable 'pda' was configured. This can be used in the booting mechanism to inform the OS that the PDA is connected.
Load Linux with U-Boot on AT91 boards
This section describes the loading of a Linux kernel and its root file system. Keep in mind useful U-Boot commands to setup your U-Boot behavior.Preparing linux image (optional)
If you want to use an uImage file with U-Boot, you can use the mkimage tool which encapsulates kernel image with header information, CRC32 checksum, etc. mkimage comes in source code with U-Boot distribution and it is built during U-Boot compilation (u-boot-source-dir/tools/mkimage). See U-Boot READMEmkimage -A arm -O linux -C none -T kernel -a 20008000 -e 20008000 -n linux-2.6 -d arch/arm/boot/Image uImageCommands to generate a compressed uImage file (2) :
mkimage -A arm -O linux -C none -T kernel -a 20008000 -e 20008000 -n linux-2.6 -d arch/arm/boot/zImage uImage
Preparing Kernel DTB image
U-Boot supports the Device Tree Binary which describes the hardware in a binary file. U-Boot can load both the DTB and kernel. The only change is runningbootm or bootz with two arguments:
bootm 0x22000000 - 0x21000000 or bootz 0x22000000 - 0x21000000
First argument is the address in memory of the Linux kernel, second one is the initrd (missing in the example, we can see a dash), third one is the address of the DTB binary.
How to patch Device Tree Blob in U-boot using Overlays
Starting from U-boot 2018.07 released in Linux4SAM6.0, we can use the feature of patching the Device Tree Blob (DTB) with additional Device Tree Overlays (DTBO).Traditional way of kernel booting
So far, to boot kernel with zImage and normal DTB, we would use a command like this:fatload mmc 0:1 0x24000000 zImage; fatload mmc 0:1 0x21000000 board.dtb; bootz 0x24000000 - 0x21000000;We can see the DTB is passed as the third argument to the command.
Loading overlays and applying them on top of the DTB
To apply the DTBO on top of the DTB, we need following commands: This will load the original DTB.
setenv fdtaddr 0x21000000;
fatload mmc 0:1 ${fdtaddr} board.dtb
This will load the DTBO into memory
setenv fdtovaddr 0x23000000;
fatload mmc 0:1 ${fdtovaddr} someoverlay.dtbo;
This will configure the address for fdt operations (we set it to the DRAM address where we loaded the base DTB)
fdt addr ${fdtaddr}
This will resize the original DTB to accommodate more space for the overlay
fdt resize 8192This will apply the DTBO loaded at fdtovaddr on top of the DTB at the address we configured with fdt addr
fdt apply ${fdtovaddr}
This will boot the kernel with the DTB at fdtaddr which now includes both the original DTB and the applied DTBO
bootz 0x24000000 - ${fdtaddr}
Loading through network
On a development system, it is useful to get the kernel and root file system through the network. U-Boot provides support for loading binaries from a remote host on the network using the TFTP protocol- setup an Ethernet address (MAC address)
Check this U-Boot network BuildRootFAQ entry to choose a proper MAC address.
to choose a proper MAC address.
setenv ethaddr 3e:36:65:ba:6f:be - setup IP parameters
- setup the server ip address where the TFTP server is running
setenv serverip 10.159.245.186 - setup board with static IP address
- the board ip address
setenv ipaddr 10.159.245.180
- the board ip address
- setup board with DHCP
- Using
dhcpcommand if you already have DHCP server in your network.
setenv get_ip 'setenv old_serverip ${serverip};setenv autoload no;dhcp;setenv serverip ${old_serverip}'
run get_ip
- Using
- setup the server ip address where the TFTP server is running
- saving Environment to flash
saveenv - if Ethernet Phy has not been detected during former bootup, reset the board to reload U-Boot : the Ethernet address and Phy initialization shall be ok, now
- download the Linux uImage and the root file system to a ram location using the U-Boot
tftpcommand (Cf. U-Boot script capability chapter). - launch Linux issuing a
bootmorbootcommand.
setenv ethact macb0,gmac0 setenv ethprime gmac0
Using FIT with overlays
Since U-boot 2018.07, released with linux4sam_6.0, we have the feature of adding Device Tree overlays to the base Device Tree at boot time, from U-boot. To achieve this, we use a FIT image, which embeds the Kernel + Device Tree blobs in a single file.Device Tree Overlays
Device Tree Overlays are available in our repository at GithubLoading FIT image with U-boot
The FIT image is a placeholder that has the zImage and the base Device Tree, plus additional overlays that can be selected at boot time. The following steps are required to boot the FIT Image from U-boot:- Load the FIT image like you would normally load the uImage or zImage.
- There is no need to load additional Device Tree Blob, the FIT image includes it
- When booting the FIT image, specify the FIT configuration to use. Several configurations can be appended to the basic configuration, which we name 'kernel_dtb'
bootm 0x24000000#kernel_dtbThis will load the FIT image from address 0x24000000 in memory and then run the configuration named 'kernel_dtb'. This configuration includes the kernel plus the base Device Tree Blob built with the kernel. To load additional FIT configurations, just append another configuration to the command. Example to load the image sensor controller Device Tree overlay + sensor omnivision 0v7740:
bootm 0x24000000#kernel_dtb#isc#ov7740
U-Boot for AT91 source code
Branches
Changes in u-boot-2023.07-mchp
- Based on U-Boot v2023.07
- MTD enhancements
- Support for new board SAMA5D29 Curiosity
- Support for new board SAM9X75 Curiosity
- Support for LAN8840 ethernet phy
- Support automatic detection and loading of extension boards
- Misc fixes
Changes in u-boot-2022.01-at91
- Based on U-Boot v2022.01
- Moved sama5d2 boards to TCB timer for OP-TEE support
- Support for new board SAMA7G5-EK
- Misc fixes
Changes in u-boot-2021.04-at91
- Based on U-Boot v2021.04
- Support for sam9x60 clock tree
- Misc fixes
Changes in u-boot-2020.01-at91
- Based on U-Boot v2020.01
- Support for SST QSPI Unlock feature, will allow erase and write on QSPI SST flashes.
- Misc fixes.
Changes in u-boot-2019.04-at91
- Based on U-Boot v2019.04
- Support for new board SAM9X60-EK
- Support for new board SAMA5D2 WLSOM1 EK
- Support for new board SAMA5D2-ICP
- Misc fixes.
Changes in u-boot-2018.07-at91
- Based on U-Boot v2018.07
- Support for PDA detection at boot and manual selection
- Support for FIT image and overlays
- Support for manually built overlays
- Support for selecting which CPU is connected for the SAM9x5EK board variants
- Misc fixes.
Changes in u-boot-2015.01-at91
- Based on U-Boot v2015.01
- Support SAMA5D4EK, SAMA5D4 Xplained and SAMA5D2 Xplained board
- Support FIT image for SAMA5D3X-EK board
- Enable SPL support for SAMA5D4 and SAMA5D3 series board.
- Support Software I2C.
- Support AT24MAC mac address
- Misc fixes.
Changes in u-boot-2014.07-at91
- Support SAMA5D4EK and SAMA5D4 Xplained board
- Support FIT image for SAMA5D3X-EK board
Tags
linux4microchip_2024.04 tag
- Support for new board SAM9X75 Curiosity
- Support for LAN8840 ethernet phy
- Support automatic detection and loading of extension boards
- Include all features in
linux4microchip_2024.04
linux4microchip_2023.10 tag
- MTD enhacements
- Support for new board SAMA5D29 Curiosity
- Include all features in
linux4microchip_2023.10
linux4sam_2023.04 tag
- Fix clock id for ebi node on SAMA7G5
linux4sam_2022.10 tag
- New Common Clock Framework (CCF) support for sama5d2 SoC and associated boards
- New defconfigs for booting under OP-TEE and in ARM Normal World for SAMA5D2 SOM1 EK
- Support for new board SAM9X60 Curiosity
- SPL on sama5d2 based boards is no longer available
- Support for new DM converted NAND flash driver (EBI, HSMC, Nand flash)
- Various fixes on Devicetree alignment, QSPI probing, SD-Card reinsertion, etc.
- Include all features in
linux4sam_2022.10
linux4sam_2022.04 tag
- Moved sama5d2 boards to TCB timer for OP-TEE support
- Support for new board SAMA7G5-EK
- Include all features in
linux4sam_2022.04
linux4sam_2021.10 tag
- Include all features in
linux4sam_2021.10
linux4sam_2021.04 tag
- Support for sam9x60 clock tree
- Include all features in
linux4sam_2021.04
linux4sam_2020.10 tag
- Galois table definition fixed for sama5d3 pmecc nand bitflips correction
- Include all features in
linux4sam_2020.10
linux4sam_2020.04 tag
- Support for SST QSPI Unlock feature, will allow erase and write on QSPI SST flashes.
- Include all features in
linux4sam_2020.04
linux4sam_6.2-icp tag
- Support SAMA5D2-ICP board
- Include all features in
linux4sam_6.2
linux4sam_6.2 tag
- Support SAM9X60-EK board
- Support SAMA5D27 WLSOM1 EK board
- Include all features in
linux4sam_6.2
linux4sam_6.1 tag
- Update U-boot to mainline 2019.04 version
- Include all features in
linux4sam_6.1
linux4sam_6.0 tag
- Include all features in
linux4sam_6.0
linux4sam_5.0-alpha7 tag
- Support SAMA5D2 Xplained board
- Support AT24MAC mac address
- Include all features in
linux4sam_4.7
linux4sam_4.7 tag
- Based on U-Boot v2015.01
- Support SAMA5D4EK and SAMA5D4 Xplained board
- Support FIT image for SAMA5D3X-EK board
- Enable SPL support for SAMA5D4 and SAMA5D3 series board.
- Support Software I2C.
- Misc fixes.
linux4sam_4.6 tag
- Add support for SAMA5D4 Xplained board
- Include all features in
linux4sam_4.5
linux4sam_4.5 tag
- Based on U-Boot v2014.07
- Add support for SAMA5D4EK board
- Support FIT image for SAMA5D3X-EK board
Build U-Boot from sources
To build the binary found above, you will have to go through the following steps.Getting U-Boot sources
Dedicated page on U-Boot wiki: http://www.denx.de/wiki/U-Boot/SourceCode- clone the Linux4sam GitHub U-Boot repository
$ git clone https://github.com/linux4microchip/u-boot-mchp.git Cloning into 'u-boot-mchp'... remote: Enumerating objects: 951876, done. remote: Counting objects: 100% (17718/17718), done. remote: Compressing objects: 100% (5735/5735), done. remote: Total 951876 (delta 12391), reused 15314 (delta 11846), pack-reused 934158 Receiving objects: 100% (951876/951876), 164.77 MiB | 401.00 KiB/s, done. Resolving deltas: 100% (790362/790362), done. $ cd u-boot-mchp/
- The source code has been taken from the master branch which is pointing to the latest branch we use. If you want to use the other branch, you can list them and use one of them by doing:
$ git branch -r origin/HEAD -> origin/master origin/dev/tony/sama7g5ek_optee origin/master origin/sam9x60_curiosity_early origin/sam9x60_early origin/sam9x60_iar origin/sam9x7_early origin/sama5d27wlsom1ek_ear origin/sama7g5_early origin/u-boot-2012.10-at91 origin/u-boot-2013.07-at91 origin/u-boot-2014.07-at91 origin/u-boot-2015.01-at91 origin/u-boot-2016.01-at91 origin/u-boot-2016.03-at91 origin/u-boot-2017.03-at91 origin/u-boot-2018.07-at91 origin/u-boot-2019.04-at91 origin/u-boot-2020.01-at91 origin/u-boot-2021.04-at91 origin/u-boot-2022.01-at91 origin/u-boot-2023.07-mchp origin/uboot_5series_1.x $ git checkout origin/u-boot-2023.07-mchp -b u-boot-2023.07-mchp Branch 'u-boot-2023.07-mchp' set up to track remote branch 'u-boot-2023.07-mchp' from 'origin'. Switched to a new branch 'u-boot-2023.07-mchp'
Setup ARM Cross Compiler
Since U-boot 2018.07, it is mandatory to use a toolchain newer than 6.0. Be warned that Linux distrubutions like Ubuntu may come with older toolchains. In such case, below is detailed how to download and install the Linaro toolchain, in the example we use 7.3.1.- Ubuntu:
In Ubuntu, you can install the ARM Cross Compiler by doing:sudo apt-get install gcc-arm-linux-gnueabi export CROSS_COMPILE=arm-linux-gnueabi-
- Others:
For others, you can download the Linaro cross compiler and setup the environment by doing:wget -c https://releases.linaro.org/components/toolchain/binaries/7.3-2018.05/arm-linux-gnueabi/gcc-linaro-7.3.1-2018.05-x86_64_arm-linux-gnueabi.tar.xz tar xf gcc-linaro-7.3.1-2018.05-x86_64_arm-linux-gnueabi.tar.xz export CROSS_COMPILE=`pwd`/gcc-linaro-7.3.1-2018.05-x86_64_arm-linux-gnueabi/bin/arm-linux-gnueabi-
Cross-compiling U-Boot
U-Boot environment
The U-Boot environmentBuild U-Boot binary
In this section we take SAM9x60-EK board as a example. Before compile the U-Boot, you need setup cross compile toolchain in the section. Once the AT91 U-Boot sources available, cross-compile U-Boot is made in two steps: configuration and compiling. Check the Configuration chapterconfigs/ to find the exact target when invoking make.
The U-Boot environment variables can be stored in different media, above config files can specify where to store the U-Boot environment.
# To put environment variables in nand flash: sam9x60ek_nandflash_defconfig # To put environment variables in SD/MMC card: sam9x60ek_mmc_defconfig # To put environment variables in qspi flash: sam9x60ek_qspiflash_defconfigHere are the building steps for the SAM9X60-EK board:
# You can change the config according to your needs. make sam9x60ek_mmc_defconfig makeThe result of these operations is a fresh U-Boot binary called
u-boot.bin corresponding to the binary ELF file u-boot. -
u-boot.binis the file you should store on the board -
u-bootis the ELF format binary file you may use to debug U-Boot through a JTag link for instance.
Program U-Boot binary into nandflash
Using SAM-BA to flash U-Boot to board
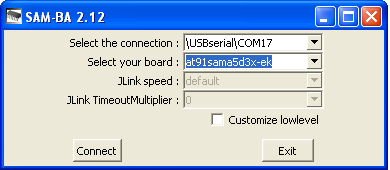
Launch SAM-BA tools
- Make sure that the chip can execute the SAM-BA Monitor
- Launch SAM-BA
- Make a connection to the chip with SAM-BA
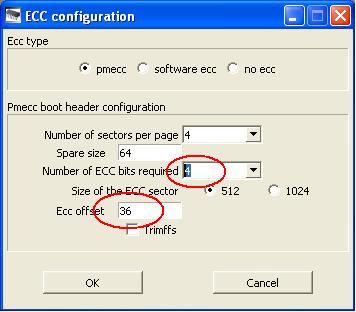
Configure NAND ECC config
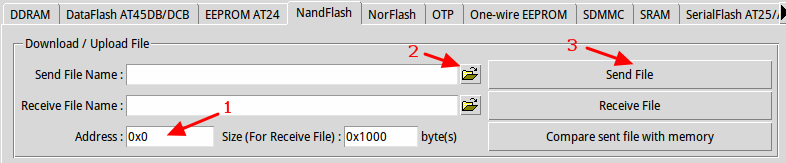
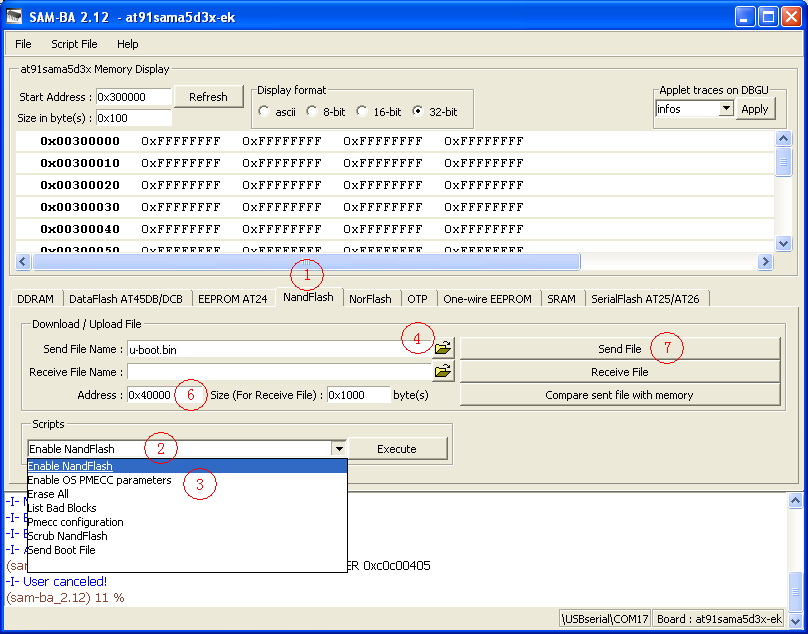
Programming U-Boot
- Modify the Address to 0x40000
- Choose Send File Name open file dialog and select the U-Boot binary file and to program the binary to the NandFlash
- Click Send File button to program the binary to the NandFlash in address 0x40000.
Using U-Boot to flash U-Boot binary to board
setenv load_add 22000000
setenv erase_uboot 'nand erase 40000 80000' # erase U-Boot in nand.
setenv mmc_uboot_file 'u-boot.bin' # u-boot file name in mmc card
setenv flash_uboot_from_mmc 'run erase_uboot;fatload mmc 0 ${load_addr} ${mmc_uboot_file}; nand write ${load_addr} 40000 ${filesize};'
run flash_uboot_from_mmc
Recent FAQ
U-BootFAQ entries
- How does U-Boot auto-detect the connected PDA on my board ?
- How can I add another Device Tree overlay to my base Device Tree blob at runtime ?
- My U-boot detects some screens but not mine. What can I do ?
- Which screens can be connected to my board? Does U-boot detect them all ?
- I have a connected screen, but U-boot detects it wrong. Can I force U-boot to load another screen configuration?
- My screen is black, although it's a right screen, it is supposed to be detected. What can I do?
- What is a FIT image and how does this work with U-boot?
- I have a working setup with a specific PDA. I want to connect another PDA. Do I need to reflash my board or change any configuration ?
- How do I use U-Boot to store binaries in FLASH ?
- How do I access U-Boot environment while Linux is running ?
- I get a strange error when booting a FIT image Node name contains @ in 'kernel@1' image node
U-Boot related FAQ entries
- U-Boot
-
• U-Boot FAQ: Some U-Boot FAQ entries. (Sama5d29Curiosity, Sam9x75Curiosity, Sam9x60Curiosity, Sama7g5-ek, Sama5d2-icp, Sam9x60EK, Sama5d27WLSom1EK, Sama5d27Som1EK, Sama5d2PtcEK, Sama5d2Xplained, Sama5d4Xplained, Sama5d3Xplained, AT91sam9x5-ek)
• Patching DTin Uboot: How to apply DTBOs in U-boot. (Sama5d29Curiosity, Sam9x75Curiosity, Sam9x60Curiosity, Sama7g5-ek, Sama5d2-icp, Sam9x60EK, Sama5d27WLSom1EK, Sama5d27Som1EK, Sama5d2PtcEK, Sama5d2Xplained, Sama5d4Xplained)
• Hasherrorwhenbooting FITimage: . (Sama5d29Curiosity, Sam9x75Curiosity, Sam9x60Curiosity, Sama5d2-icp, Sam9x60EK, Sama5d27WLSom1EK, Sama5d27Som1EK, Sama5d2PtcEK, Sama5d2Xplained, Sama5d4Xplained, Sama5d3Xplained)
• Using FITwith Overlays: How to use U-boot with FIT image to load overlays. (Sama5d29Curiosity, Sam9x75Curiosity, Sam9x60Curiosity, Sama7g5-ek, Sama5d2-icp, Sam9x60EK, Sama5d27WLSom1EK, Sama5d27Som1EK, Sama5d2PtcEK, Sama5d2Xplained, Sama5d4Xplained, Sama5d3Xplained)
• Sam 9 x 60 Ek Attaching Tm 5000 Display: Addition to the other generic FAQ about LCD displays: ConnectModuleFromPDA. (Sam9x60EK)
• PDADetection At Boot: PDA detection in U-boot. (Sam9x60EK, Sama5d27WLSom1EK, Sama5d27Som1EK, Sama5d2PtcEK, Sama5d2Xplained, Sama5d4Xplained, Sama5d3Xplained)
• Selecting PDAat Boot: How to manually select PDA in U-boot. (Sam9x60EK, Sama5d27WLSom1EK, Sama5d27Som1EK, Sama5d2PtcEK, Sama5d2Xplained, Sama5d4Xplained, Sama5d3Xplained, AT91sam9x5-ek)
• Driver Model In UBoot: How to enable U-Boot driver model, using Sama5d2Xplained as an example. (Sama5d27Som1EK, Sama5d2PtcEK, Sama5d2Xplained, Sama5d4Xplained, Sama5d4ek, Sama5d3Xplained, Sama5d3xek)
• Console No Longer Receives Characters: Can't interact with the console. (Sama5d27Som1EK, Sama5d2PtcEK)
• Uboot Fit Image: How to use the FIT image. (Sama5d3xek)


|
|||||||||||||||||||||||||||||
r107 - 18 Jun 2024 - 08:17:09 - NicolasFerre
Linux4SAM
Open source solutions ApplicationsBoards
- SAM9X75 Curiosity
- SAMA5D29 Curiosity
- SAM9X60 Curiosity
- SAMA7G5-EK
- SAMA5D2-ICP
- SAMA5D27 WLSOM1 EK
- SAM9X60-EK
- SAMA5D27 SOM1 EK
- SAMA5D2 PTC EK
- SAMA5D2 Xplained
- SAMA5D3 Xplained
- SAMA5D4 Xplained
- Older boards
FAQ
Useful links
- Microchip Microprocessors forums
- AT91 Community (archive)
- Microchip
- Linux4Microchip on GitHub
- Linux4SAM on GitHub
NAVIGATION

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Copyright © by the contributing authors. All material on this collaboration platform is the property of the contributing authors.
Linux® is the registered trademark of Linus Torvalds in the U.S. and other countries.
Microchip® and others, are registered trademarks or trademarks of Microchip Technology Inc. and its subsidiaries. ![]()
Arm® and others are registered trademarks or trademarks of Arm Limited (or its affiliates). Other terms and product names may be trademarks of others.
Ideas, requests, contributions ? Connect to LinksToCommunities page.