SAMA7G5 and Omnivision OV7740
This page describes the possibility of connecting a parallel sensor (example given is Omnivision ov7740) to the SAMA7G5 MPU.
Introduction
Omnivision OV7740 is a parallel sensor , 8 bit Raw BAYER, that can also stream directly YUYV format.Device Tree configuration
This is an example Device Tree configuration. It uses a specific ISC I/O IOSET. One has to adapt this to its own board The example shows how to connect endpoints between the different nodes in the DT, to have everything in place for a parallel capture.
&csi2dc {
/* this clock is requested by the csi2dc from the xisc,
* and then it's passed to the sensor. It is mandatory to
* request the same frequency, otherwise the clock subsystem
* will change the frequency to the last one requested */
assigned-clock-rates = <24000000>;
status = "okay";
ports {
port@0 {
csi2dc_in: endpoint {
/* csi2dc will automatically understand from the endpoint if this is a Parallel or CSI2 endpoint connection */
remote-endpoint = <&ov7740_0>;
};
};
};
};
&flx1 {
/* make sure flexcom1 is in TWI mode for the i2c1 subnode below... */
atmel,flexcom-mode = <ATMEL_FLEXCOM_MODE_TWI>;
};
&i2c1 {
#address-cells = <1>;
#size-cells = <0>;
ov7740: camera@21 {
compatible = "ovti,ov7740";
reg = <0x21>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_sensor_power &pinctrl_sensor_reset>;
reset-gpios = <&pioA PIN_PA13 GPIO_ACTIVE_LOW>;
powerdown-gpios = <&pioA PIN_PA12 GPIO_ACTIVE_HIGH>;
clocks = <&xisc>;
clock-names = "xvclk"; /* be careful at the clock name, to be the one expected by the driver */
assigned-clocks = <&xisc>;
assigned-clock-rates = <24000000>; /* also requested by csi2dc above */
status = "okay";
port {
ov7740_0: endpoint {
remote-endpoint = <&csi2dc_in>;
hsync-active = <1>;
vsync-active = <0>;
pclk-sample = <1>;
};
};
};
};
&pioA {
pinctrl_sensor_power: sensor_power {
pinmux = <PIN_PA12__GPIO>;
bias-disable;
};
pinctrl_sensor_reset: sensor_reset {
pinmux = <PIN_PA13__GPIO>;
bias-disable;
};
};
&xisc {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_isc_base &pinctrl_isc_data_8bit>;
status = "okay";
port {
xisc_in: endpoint {
hsync-active = <1>;
vsync-active = <0>;
pclk-sample = <1>;
};
};
};
&pioA {
pinctrl_isc_base: isc_base {
pinmux = <PIN_PA27__ISC_PCK>,
<PIN_PA25__ISC_VSYNC>,
<PIN_PA24__ISC_HSYNC>,
<PIN_PA15__ISC_MCK>;
bias-disable;
};
/* ISC uses the top data bits always, if your sensor outputs 10 bits e.g., you need to use D2-D11 */
pinctrl_isc_data_8bit: isc_data_8bit {
pinmux = <PIN_PA31__ISC_D11>,
<PIN_PA30__ISC_D10>,
<PIN_PA29__ISC_D9>,
<PIN_PA28__ISC_D8>,
<PIN_PA23__ISC_D7>,
<PIN_PA22__ISC_D6>,
<PIN_PA21__ISC_D5>,
<PIN_PA20__ISC_D4>;
bias-disable;
};
};
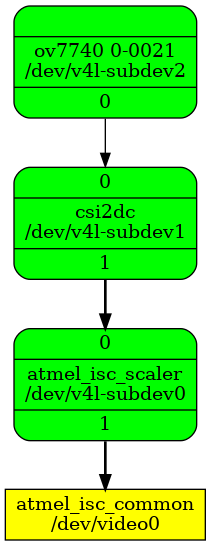
Media controller pipeline
If probed correctly, the media controller pipeline looks like this:
# media-ctl -p
Media controller API version 5.16.0
Media device information
------------------------
driver atmel_isc_commo
model microchip,sama7g5-isc
serial
bus info platform:microchip-sama7g5-xisc
hw revision 0x220
driver version 5.16.0
Device topology
- entity 1: atmel_isc_scaler (2 pads, 2 links)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev0
pad0: Sink
[fmt:SBGGR8_1X8/3264x2464 field:none colorspace:srgb
crop.bounds:(0,0)/3264x2464
crop:(0,0)/3264x2464]
<- "csi2dc":1 [ENABLED,IMMUTABLE]
pad1: Source
[fmt:SBGGR8_1X8/3264x2464 field:none colorspace:srgb]
-> "atmel_isc_common":0 [ENABLED,IMMUTABLE]
- entity 4: csi2dc (2 pads, 2 links)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev1
pad0: Sink
[fmt:SRGGB8_1X8/640x480 field:none colorspace:srgb]
<- "ov7740 0-0021":0 [ENABLED]
pad1: Source
[fmt:SRGGB8_1X8/640x480 field:none colorspace:srgb]
-> "atmel_isc_scaler":0 [ENABLED,IMMUTABLE]
- entity 7: ov7740 0-0021 (1 pad, 1 link)
type V4L2 subdev subtype Sensor flags 0
device node name /dev/v4l-subdev2
pad0: Source
[fmt:YUYV8_2X8/640x480@1/60 field:none colorspace:srgb]
-> "csi2dc":0 [ENABLED]
- entity 17: atmel_isc_common (1 pad, 1 link)
type Node subtype V4L flags 1
device node name /dev/video0
pad0: Sink
<- "atmel_isc_scaler":1 [ENABLED,IMMUTABLE]
#
The pipeline can be also represented as a graph, as in the picture below:
Capturing
Capturing YUYV directly from the sensor
v4l2-ctl -v pixelformat=YUYV,height=480,width=640 # configure video format to YUYV packed 16 bits per pixel media-ctl --set-v4l2 '"ov7740 0-0021":0[fmt:YUYV8_2X8/640x480@1/60 field:none colorspace:srgb]' # configure sensor to stream YUYV directly in 2 bytes per pixel 2x8 media-ctl --set-v4l2 '"csi2dc":0[fmt:YUYV8_2X8/640x480 field:none colorspace:srgb]' # configure csi2dc accordingly media-ctl --set-v4l2 '"atmel_isc_scaler":0[fmt:YUYV8_2X8/640x480 field:none colorspace:srgb]' # configure scaler accordingly fswebcam -r 640x480 -p YUYV -S 20 test.jpg # capture YUYV packed 2 bytes per pixel at 640x480
Capturing RAW from sensor and converting in the ISC
v4l2-ctl -v pixelformat=YU12,height=480,width=640 # configure video format to YUV planar 4:2:0 media-ctl --set-v4l2 '"ov7740 0-0021":0[fmt:SBGGR8_1X8/640x480@1/60 field:none colorspace:srgb]' # configure sensor to stream raw bayer BGGR 8 bits media-ctl --set-v4l2 '"csi2dc":0[fmt:SBGGR8_1X8/640x480 field:none colorspace:srgb]' #configure csi2dc accordingly media-ctl --set-v4l2 '"atmel_isc_scaler":0[fmt:SBGGR8_1X8/640x480 field:none colorspace:srgb]' # configure scaler accordingly fswebcam -r 640x480 -p YUV420P -S 20 testplanar.jpg # simple capture at 640x480 in YUV4:2:0 planar
Supported sensor formats
We can always query the sensor for which formats it supports:
# v4l2-ctl -d /dev/v4l-subdev2 --list-subdev-mbus-codes
ioctl: VIDIOC_SUBDEV_ENUM_MBUS_CODE (pad=0)
0x2008: MEDIA_BUS_FMT_YUYV8_2X8
0x3001: MEDIA_BUS_FMT_SBGGR8_1X8
#
| WebFaqBaseForm | |
|---|---|
| Boards | Sama7g5-ek |
| Components | Kernel, linux-5.15-mchp, linux-6.1-mchp, linux-6.6-mchp |
| Summary | Interfacing sama7g5 with parallel omnivision ov7740 sensor. |


|
|||||||||||||||
r10 - 28 May 2024 - 10:56:46 - AndreiSimion
Linux4SAM
Open source solutions ApplicationsBoards
- SAM9X75 Curiosity
- SAMA5D29 Curiosity
- SAM9X60 Curiosity
- SAMA7G5-EK
- SAMA5D2-ICP
- SAMA5D27 WLSOM1 EK
- SAM9X60-EK
- SAMA5D27 SOM1 EK
- SAMA5D2 PTC EK
- SAMA5D2 Xplained
- SAMA5D3 Xplained
- SAMA5D4 Xplained
- Older boards
FAQ
Useful links
- Microchip Microprocessors forums
- AT91 Community (archive)
- Microchip
- Linux4Microchip on GitHub
- Linux4SAM on GitHub
NAVIGATION

{kind=link}
Copyright © by the contributing authors. All material on this collaboration platform is the property of the contributing authors.
Linux® is the registered trademark of Linus Torvalds in the U.S. and other countries.
Microchip® and others, are registered trademarks or trademarks of Microchip Technology Inc. and its subsidiaries. ![]()
Arm® and others are registered trademarks or trademarks of Arm Limited (or its affiliates). Other terms and product names may be trademarks of others.
Ideas, requests, contributions ? Connect to LinksToCommunities page.